
































مقالات
خط کش های ديجيتال و کد گشائی آن ها
خط کش های دیجیتال برای کنترل سیستم های NC و CNC سنسورهایی باید مورد استفاده قرار گیرد. که بتواند مقدار جابجائی بر حسب متر، میلی متر و میکرو متر را به صورت سیگنال الکتریکی در اختیار قرار بدهد. در این پدیده ها شخص جائی ندارد و سنسور خط کش، خود باید جابجائی ها را بسنجد.
برای تبدیل دما از تغییر ولتاژ دو سر دیود زنری مشخص استفاده می شود. اما سیستمی که بتواند جابجائی را تشخیص دهد مسلماً فرق خواهد کرد. برای باور دیدگاهی که بتواند جابجائی را آشکار سازد تشخیص تعداد دور موتور مثال خوبی خواهد بود به این ترتیب که در آن می توان یک فرستنده و گیرنده نوری را در دو طرف پره ای که به روتور موتور وصل است قرار داد.

انواع خط کش دیجیتال
با چرخش موتور این پره مسیر نور را قطع و وصل می کند و تعداد قطع و وصل مقدار چرخش را مشخص می سازد. این سنسور برای شناخت تعداد دور بسیار ساده و بسیار مناسب است. اما برای رسیدن به دقت های بالا و برای تشخیص نصف، یک چهارم و … از یک دور باید تکنیک ساده بالا بهبود یابد که در بخش های بعدی این روش ها ارائه می گردند. این ها همان اصولی هستند که در انکدرهای دیجیتالی میزان چرخش و مقدار جابجائی مورد استفاده قرار می گیرند.
ميزان چرخش
زمانیکه سیستم دقت بالاتری بطلبد یعنی اینکه علاوه بر تعداد دورها به یک دوم دور، یک چهارم دور و … نیز حساس باشد یا باید در فواصل منظم بر روی دایره ای تعداد سنسورها زیادتر گردند. تا آن پره تک پر در هر مکانی یکی از این سنسورها را قطع و وصل کند. یا ارزانتر و ساده تر اینکه یک سنسور قرار داده شود. در عوض تعداد پره های متصل به روتور زیاد تر گردند. این همان تکنیکی است که در خط کش های نوع دوم یا به عبارت دیگر مقیاس بندهای نوع دوم یا چرخشی بکار می رود.
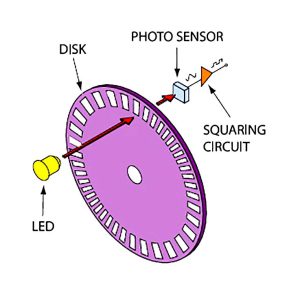
در آن ها یک صفحه دایره ای فلزی سوراخ های زیادی را در فواصل منظم ایجاد می کنند. این دایره به روی محوری می چرخد که این محور به روتور موتور الکتریکی وصل می شود. در پشت این پالس های ایجاد شده یک مدار دیکدر جهت و میزان چرخش و با مدیریت پروسسور مکان دقیق را محاسبه کرده و نمایش می دهد.
در حالتی که دقت بسیار بالاتری مد نظر باشد چون که سوراخ کاری صفحه فلزی از نظر مکانیکی و اندازه سوراخ ها محدود است به جای سوراخ کاری خطوطی را روی صفحه ای شیشه ای ایجاد می کنند.
تعيين جهت چرخش
تکنیکی که در بالا اشاره شد تنها مقدار چرخش را بیان می کند و این سنسور و مدار پشت سر آن تنها برای زمانی که موتور فقط در یک جهت حرکت می کند مناسب است و برای کاربردهای CNC و NC که موتورهای الکتریکی از قبیل سروو موتور AC و DC هستند و چرخش های چپ گرد، راستگرد دارند این تکنیک به تنهائی کارا نیست.
سروو متور و خطکش چرخشی
عدم کارائی از اینجا ناشی می شود که یک سیستم پردازشگر وجود دارد و یک مکان شمارش که اکثراً سیستم کنترل دقیقاً پروسسور نیست. همچنین یک قسمت آسنکرون عمل کنترل جهت چرخش و تعداد دور چرخش را معین می کند و پروسسور تنها از طریق شمارنده ها به تحلیل مکان می پردازد.
طراحی سنسور
سنسور طوری باید طراحی شود که جهت چرخش را نیز به مدار شمارشگر بدهد. برای اینکار به جای استفاده از یک سنسور نور، در مقابل سوراخ های موجود روی قرص دایره ای دو سنسور نوری قرار داده می شود. فاصله آن دو را به گونه ای تنظیم می شود که پالس های ایجاد شده توسط دو سنسور اختلاف فازی برابر 90° با هم داشته باشند.
دو موج حاصل از خروجی خطکش، پس از تقویت و تبدیل به موج مربعی دیده می شود همانطوری که از شکل پیداست این دو موج با هم اختلاف فازی برابر 90 درجه دارند. زمانیکه سیگنال XA از سیگنال XB باندازه 90 درجه پیش فاز باشد نشانه راستگرد بودن چرخش و زمانی که سیگنال XB از سیگنال XA باندازه 90 درجه پیش فاز باشد نشانه چپگرد بودن چرخش خواهد بود.
بنابراین از پس فاز یا پیش فاز بودن سیگنال A نسبت به B می توان جهت حرکت را نیز تعیین کرد و حال به جای استفاده از یک شمارنده ساده، از یک شمارنده بالا پائین شمار و یک مدار تشخیص جهت استفاده می گردد که در آن صورت در هر زمانی مقدار دقیق جابجائی نسبت به مبدا را خواهیم داشت.
برخی مدل های پیشنهادی با توجه به این زمینه کاری (توضیحات مربوط به تجهیزات در کاتالوگ ذکر شده)
